
Apply Photometric Perturbations#
This notebook demonstrates how to apply photometric perturbations, which are modifications to pixel intensity, color, and brightness properties, using NRTK.
We use a sample image from the VisDrone dataset to demonstrate noise, blur, and enhancement perturbations.
To run this notebook in Colab, use the link below:
![]()
Set Up the Environment#
Note for Colab users: After setting up the environment, you may need to “Restart Runtime” to resolve package version conflicts (see the README for more info).
This notebook requires NRTK with the following extras: headless, Pillow, and skimage
headlessorgraphics- OpenCV headless or graphics for blur perturbationsPillow- PIL for enhancement perturbations (brightness, color, contrast, sharpness)skimage- scikit-image for noise perturbations
Note: We are suppressing warnings within this notebook to reduce visual clutter for demonstration purposes. If any issues arise while executing this notebook, we recommend that this cell is not executed so that any related warnings are shown.
import warnings
warnings.filterwarnings("ignore")
%pip install -qU pip
print("Installing nrtk with required extras...")
try:
import cv2 # noqa: F401 -- intentionally unused, just checking availability
import PIL # noqa: F401 -- intentionally unused, just checking availability
import skimage # noqa: F401 -- intentionally unused, just checking availability
import nrtk # noqa: F401 -- intentionally unused, just checking availability
except ImportError:
%pip install -q "nrtk[headless,pillow,skimage]"
pass # jupytext converts %pip to a comment, so pass keeps the block valid
print("Installing matplotlib...")
%pip install -q matplotlib
print("Installing headless OpenCV...")
%pip uninstall -qy opencv-python opencv-python-headless
%pip install -q opencv-python-headless
print("Done!")
Note: you may need to restart the kernel to use updated packages.
Installing nrtk with required extras...
Installing matplotlib...
Note: you may need to restart the kernel to use updated packages.
Installing headless OpenCV...
WARNING: Skipping opencv-python as it is not installed.
Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.
Done!
%matplotlib inline
%config InlineBackend.figure_format = "jpeg" # Use JPEG format for inline visualizations
import os
import urllib.request
from typing import TYPE_CHECKING, Any
import numpy as np
from matplotlib import pyplot as plt
from matplotlib.axes import Axes
from PIL import Image
from nrtk.impls.perturb_image.photometric.blur import AverageBlurPerturber, GaussianBlurPerturber, MedianBlurPerturber
from nrtk.impls.perturb_image.photometric.enhance import (
BrightnessPerturber,
ColorPerturber,
ContrastPerturber,
SharpnessPerturber,
)
from nrtk.impls.perturb_image.photometric.noise import (
GaussianNoisePerturber,
PepperNoisePerturber,
SaltAndPepperNoisePerturber,
SaltNoisePerturber,
SpeckleNoisePerturber,
)
Select Initial Image#
We’ll carry out perturbations on a single image from VisDrone.
data_dir = "./data"
os.makedirs(data_dir, exist_ok=True)
url = "https://data.kitware.com/api/v1/item/623880f14acac99f429fe3ca/download"
img_path = os.path.join(data_dir, "visdrone_img.jpg")
if not os.path.isfile(img_path):
_ = urllib.request.urlretrieve(url, img_path) # noqa: S310
img = np.asarray(Image.open(img_path))
plt.figure(figsize=(8, 8))
plt.axis("off")
_ = plt.imshow(img)

We’ll also define a couple of helper functions for displaying our perturbations.
def display_pert(img: np.ndarray, descriptor: str = "") -> None:
"""Display perturbation."""
_, axs = plt.subplots(figsize=(8, 8))
if TYPE_CHECKING:
assert isinstance(axs, Axes)
axs.set_title(descriptor)
axs.imshow(img)
axs.axis("off")
def config_to_str(config: dict[str, Any]) -> str:
"""Generate string to describe config."""
out = ", ".join([f"{k}={v}" for k, v in config.items()])
return f"({out})"
Noise Perturbers#
Noise perturbations add different forms of random variation to the image, and are implemented using scikit-image’s noise functions. For all of these perturbers, you can specify a seed for reproducible results.
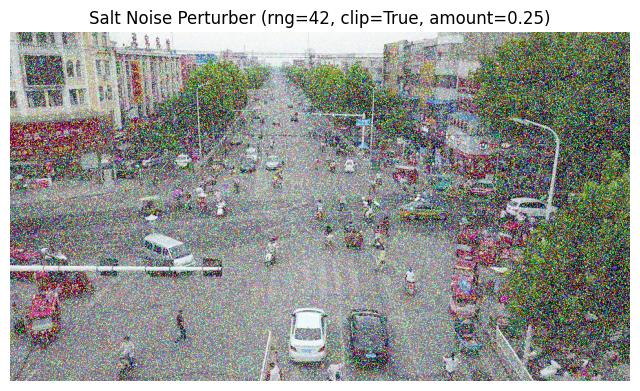
Salt Noise Perturber#
The SaltNoisePerturber replaces random pixels with 1.
seed = 42
amount = 0.25
salt_noise_perturber = SaltNoisePerturber(
seed=seed,
amount=amount,
)
salt_noise_out, _ = salt_noise_perturber(image=img)
display_pert(salt_noise_out, f"Salt Noise Perturber {config_to_str(salt_noise_perturber.get_config())}")
Since we specified a seed, we can confirm that our results are reproducible:
salt_noise_perturber_2 = SaltNoisePerturber(
seed=seed,
amount=amount,
)
salt_noise_out_2, _ = salt_noise_perturber_2(image=img)
print(np.array_equal(salt_noise_out, salt_noise_out_2))
assert np.array_equal(salt_noise_out, salt_noise_out_2) # noqa: S101
True
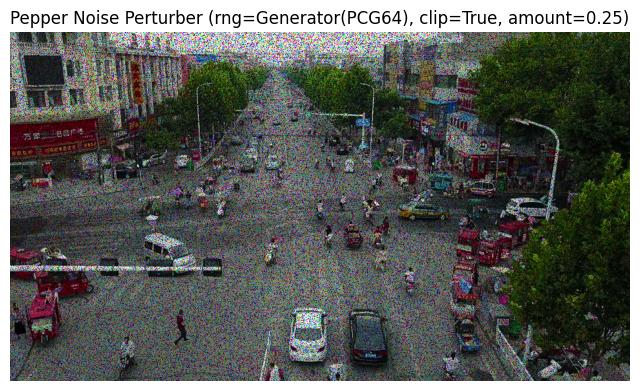
Pepper Noise Perturber#
The PepperNoisePerturber replaces random pixels with 0 (for unsigned images) or -1 (for signed images).
seed = 42
amount = 0.25
pepper_noise_perturber = PepperNoisePerturber(
seed=seed,
amount=amount,
)
pepper_noise_out, _ = pepper_noise_perturber(image=img)
display_pert(pepper_noise_out, f"Pepper Noise Perturber {config_to_str(pepper_noise_perturber.get_config())}")
Again, we can confirm that our results are reproducible by using the same seed.
pepper_noise_perturber_2 = PepperNoisePerturber(
seed=seed,
amount=amount,
)
pepper_noise_out_2, _ = pepper_noise_perturber_2(image=img)
print(np.array_equal(pepper_noise_out, pepper_noise_out_2))
assert np.array_equal(pepper_noise_out, pepper_noise_out_2) # noqa: S101
True
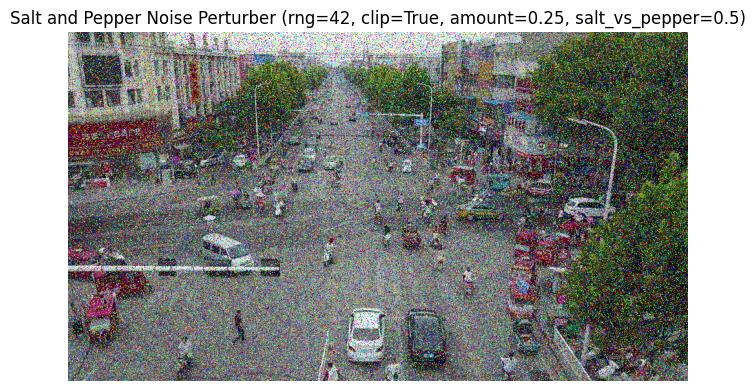
Salt and Pepper Noise Perturber#
The SaltAndPepperNoisePerturber replaces random pixels with either salt or pepper noise. Just as before, reproducibility is possible with the seed parameter, but we won’t continue to demonstrate that.
seed = 42
amount = 0.25
salt_vs_pepper = 0.5
sp_noise_perturber = SaltAndPepperNoisePerturber(
seed=seed,
amount=amount,
salt_vs_pepper=salt_vs_pepper,
)
sp_noise_out, _ = sp_noise_perturber(image=img)
display_pert(sp_noise_out, f"Salt and Pepper Noise Perturber {config_to_str(sp_noise_perturber.get_config())}")
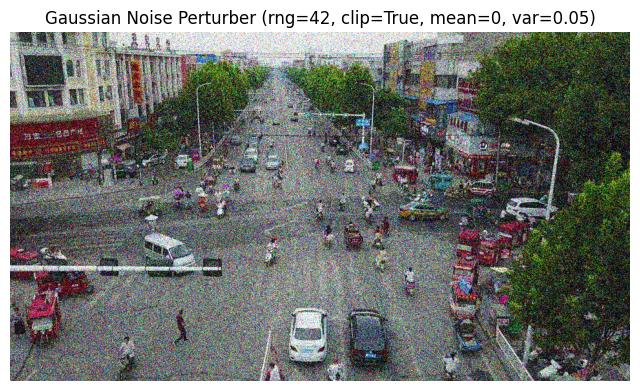
Gaussian Noise Perturber#
The GaussianNoisePerturber adds Gaussian-distributed noise to the image.
seed = 42
mean = 0
var = 0.05
gaussian_noise_perturber = GaussianNoisePerturber(
seed=seed,
mean=mean,
var=var,
)
gaussian_noise_out, _ = gaussian_noise_perturber(image=img)
display_pert(gaussian_noise_out, f"Gaussian Noise Perturber {config_to_str(gaussian_noise_perturber.get_config())}")
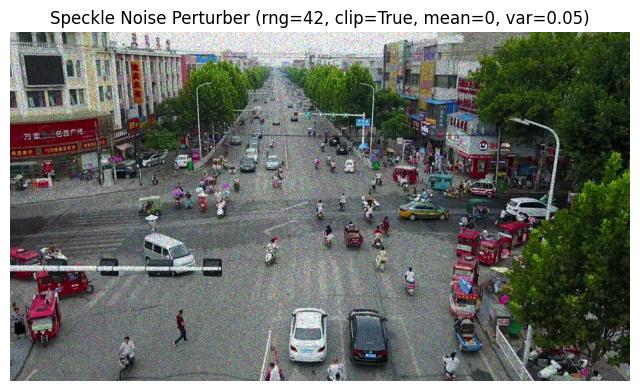
Speckle Noise Perturber#
The SpeckleNoisePerturber adds multiplicative, Gaussian-distributed noise to the image.
seed = 42
mean = 0
var = 0.05
speckle_noise_perturber = SpeckleNoisePerturber(
seed=seed,
mean=mean,
var=var,
)
speckle_noise_out, _ = speckle_noise_perturber(image=img)
display_pert(speckle_noise_out, f"Speckle Noise Perturber {config_to_str(speckle_noise_perturber.get_config())}")
Blur Perturbers#
These blur perturbers apply various convolution-based smoothing operations and are implemented using OpenCV.
Average Blur Perturber#
The AverageBlurPerturber applies “average” blurring to the image stimulus. To achieve this, OpenCV convolves the image with a normalized box filter, so the average of the pixels under the kernel replaces the central element.
ksize = 7
avg_blur_perturber = AverageBlurPerturber(
ksize=ksize,
)
avg_blur_out, _ = avg_blur_perturber(image=img)
display_pert(avg_blur_out, f"Average Blur Perturber {config_to_str(avg_blur_perturber.get_config())}")

Gaussian Blur Perturber#
The GaussianBlurPerturber applies Gaussian blurring to the image stimulus by using a Gaussian kernel instead of a normalized box filter.
ksize = 7
gaussian_blur_perturber = GaussianBlurPerturber(
ksize=ksize,
)
gaussian_blur_out, _ = gaussian_blur_perturber(image=img)
display_pert(gaussian_blur_out, f"Gaussian Blur Perturber {config_to_str(gaussian_blur_perturber.get_config())}")

Median Blur Perturber#
The MedianBlurPerturber applies median blurring to the image stimulus, where the central element is replaced with the median value of the pixels under the kernel.
ksize = 7
median_blur_perturber = MedianBlurPerturber(
ksize=ksize,
)
median_blur_out, _ = median_blur_perturber(image=img)
display_pert(median_blur_out, f"Median Blur Perturber {config_to_str(median_blur_perturber.get_config())}")

Enhancement Perturbers#
Enhancement perturbations adjust properties such as brightness, color balance, contrast, and sharpness, and are implemented using the Python Imaging Library (PIL). A factor of 1.0 returns a copy of the original image. Lower factor values mean less of the relevant property (e.g. darker for brightness), while higher values mean more (e.g. brighter for brightness).
Brightness Perturber#
The BrightnessPerturber adjusts the brightness of the image stimulus.
factor = 0.25
brightness_perturber = BrightnessPerturber(
factor=factor,
)
brightness_out, _ = brightness_perturber(image=img)
display_pert(brightness_out, f"Brightness Perturber {config_to_str(brightness_perturber.get_config())}")

Color Perturber#
The ColorPerturber adjusts the color balance of the image stimulus.
factor = 0.15
color_perturber = ColorPerturber(
factor=factor,
)
color_out, _ = color_perturber(image=img)
display_pert(color_out, f"Color Perturber {config_to_str(color_perturber.get_config())}")

Contrast Perturber#
The ContrastPerturber adjusts the contrast of the image stimulus.
factor = 3.5
contrast_perturber = ContrastPerturber(
factor=factor,
)
contrast_out, _ = contrast_perturber(image=img)
display_pert(contrast_out, f"Contrast Perturber {config_to_str(contrast_perturber.get_config())}")

Sharpness Perturber#
The SharpnessPerturber adjusts the sharpness of the image stimulus. The sharpness factor is limited to [0.0, 2.0].
factor = 0.15
sharpness_perturber = SharpnessPerturber(
factor=factor,
)
sharpness_out, _ = sharpness_perturber(image=img)
display_pert(sharpness_out, f"Sharpness Perturber {config_to_str(sharpness_perturber.get_config())}")
