Introduction
Welcome to the documentation for the Natural Robustness Toolkit (NRTK), a platform created for developers seeking to rigorously evaluate and enhance the robustness of computer vision models. This toolkit simulates a wide range of real-world perturbations, focusing on sensor-specific variables such as changes in camera focal length and aperture diameter. It provides a detailed analysis of how these factors affect algorithm performance and expand existing datasets. Whether you’re dealing with subtle shifts in optical settings or more pronounced environmental changes, this toolkit gives you the insights and capabilities necessary to ensure your innovative computer vision solutions are resilient and reliable under diverse conditions.
This documentation is structured to provide you with straightforward and practical instructions and examples, so that you can effectively leverage the toolkit to enhance the robustness and reliability of your computer vision applications in facing real-world challenges.
Background
Computer vision models are sensitive to data distribution shifts, either due to synthetic image perturbations [1] or those naturally occurring in real data [2]. Existing image augmentation libraries (e.g. imgaug and albumentations) do not cover physics-based, sensor-specific perturbations that are relevant to operational data.
The gold standard for evaluating AI model robustness is to score against comprehensive real-test data spanning all dimensions of expected deployment-condition variability. While there is no substitute for collecting diverse test data, complete coverage is prohibitively expensive or impossible in many applications. You can use NRTK to force-multiply your finite test dataset in a principled way that covers the wider range of natural variations and corruptions expected during real-world deployment.
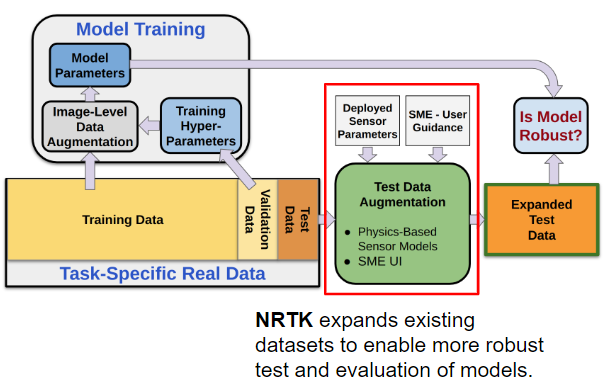
Figure 1: Extending Robustness Testing with NRTK.
Use Cases
You can use NRTK to assess the robustness of computer vision models trained on satellite images to changes in different sensor parameters (e.g. focal length, aperture, pixel pitch, etc.). For example, one use case is the task of designing a new satellite to support AI-based detection and classification of particular objects. With NRTK, you can start with high-resolution aerial imagery with known ground-sample-distance, then emulate imagery that would have been collected from a hypothetical telescope with prescribed properties to explore the trade-off of telescope cost versus performance. You can also develop validated sets of sensor perturbation parameters and expanded datasets for comprehensive model test and evaluation (T&E).
Refer to the Getting Started section for an in-depth example of how to use NRTK.
Toolkit Overview
The nrtk package is an open source toolkit for evaluating the natural robustness of computer vision algorithms to various perturbations, including sensor-specific changes to camera focal length, aperture diameter, etc. Functionality is provided through Strategy and Adapter patterns to allow for modular integration into systems and applications.
The toolkit includes several types of general image perturbations, as well as sensor-based perturbations based on the open source library pyBSM [3]. pyBSM rigorously models radiative transfer and imaging-sensor physics, allowing a user to provide source images, ideally with minimal corruptions to start. These source images are then rendered to emulate pre-sensor, in-sensor, and post-sensor corruptions that would have been incurred by another sensor with precise specification (altitude, atmospheric turbulence, focal length, aperture size, focus blur, pixel pitch, quantum efficiency, shot/readout noise, and compression, among many others).
The nrtk package provides image perturbation followed by score generation and can work with any computer vision model in a black-box manner. The perturbations themselves are independent or agnostic of a downstream task, but nrtk’s interfaces allow for evaluation of classification and detection models.
The nrtk algorithms can also be organized according to their respective tasks:
- Image perturbation:
- Score generation:
References
1. Hendrycks, Dan, and Thomas Dietterich. “Benchmarking Neural Network Robustness to Common Corruptions and Perturbations.” International Conference on Learning Representations. 2018.
2. Recht, Benjamin, et al. “Do imagenet classifiers generalize to imagenet?.” International Conference on machine learning. PMLR, 2019.
3. LeMaster, Daniel A., and Michael T. Eismann. 2017. “pyBSM: A Python package for modeling imaging systems.” Proceedings of the SPIE 10204.