
Test and Analyze Model Robustness with NRTK and XAITK for the Object Detection Task#
Overview#
This guide demonstrates how to integrate the Natural Robustness Toolkit (NRTK) with XAITK-Saliency to assess model robustness and understand why models fail. Unlike traditional robustness testing, which only measures performance degradation, this approach reveals how the features your model focuses on change under perturbation, allowing you to interpret and act on the results as they are generated.
This notebook is created from Explaining model robustness: combining saliency maps and natural robustness testing using XAITK and NRTK.
What You’ll Accomplish#
Apply systematic perturbations and generate interpretable saliency maps.
Recognize robust vs. sensitive model behaviors as you test.
Quantify saliency changes and understand what they indicate in an object detection task.
Make informed decisions about model deployment and improvement.
Important note prior to running this notebook#
This notebook requires atleast 32GB of CPU RAM (and enough swap space if using linux-based systems) to run this notebook without experiencing any kernel crashes caused by memory issues.
Table of Contents#
Set Up the Environment#
import sys
%pip install -qU pip
print("Installing nrtk with optional dependencies...")
try:
import cv2 # noqa: F401 -- intentionally unused, just checking availability
import maite # noqa: F401 -- intentionally unused, just checking availability
import pybsm # noqa: F401 -- intentionally unused, just checking availability
import skimage # noqa: F401 -- intentionally unused, just checking availability
import nrtk # noqa: F401 -- intentionally unused, just checking availability
except ImportError:
%pip install -q "nrtk[pybsm,maite,tools,skimage,headless]"
print("Install huggingface transformers and datasets")
%pip install -q transformers datasets
print("Installing ultralytics...")
%pip install -q ultralytics
print("Installing tabulate...")
%pip install -q tabulate
print("Installing xaitk-saliency")
%pip install -q xaitk_saliency
print("Installing headless OpenCV...")
%pip uninstall -qy opencv-python opencv-python-headless
%pip install -q opencv-python-headless
print("Done!")
from __future__ import annotations # noqa: F404
# Python imports
import os
import random
import warnings
from collections.abc import Sequence
from pathlib import Path
# 3rd party imports
import matplotlib.pyplot as plt
import numpy as np
import torch
# Seed setting for reproducibility
seed = 123
os.environ["PYTHONHASHSEED"] = str(seed)
random.seed(seed)
np.random.default_rng(seed)
torch.manual_seed(seed)
%matplotlib inline
%config InlineBackend.figure_format = "jpeg" # Use JPEG format for inline visualizations
warnings.filterwarnings("ignore")
# Add notebook utils to path
notebook_dir = Path().absolute()
utils_path = notebook_dir / "utils"
if str(utils_path) not in sys.path:
sys.path.insert(0, str(utils_path))
Define Model and Dataset#
The NRTK-XAITK workflow depends on HuggingFace (HF) to download the required model. To align the dataset/model to the Object Detection evaluation workflow, we need to adapt the HF model to be compliant with MAITE protocols. In the section below, we define the HuggingFace-MAITE adapters for the VisDrone dataset and HF pretrained-model for the Object Detection task.
Note: Make sure to set the local, absolute paths to the images and annotations subfolders from the VisDrone dataset split in the cell below.
from object_detection.dataset import (
VisDroneObjectDetectionDataset,
stratified_sample_dataset,
)
from object_detection.model import MaiteYOLODetector
# Check if CUDA is available and set the device accordingly
CUDA_AVAILABLE = torch.cuda.is_available()
device = "cuda" if CUDA_AVAILABLE else "cpu"
# Make sure to set the local paths to the VisDrone dataset here
VISDRONE_DIR = "/path/to/visdrone"
IMAGES_DIR = VISDRONE_DIR + "/images"
ANNOTATIONS_DIR = VISDRONE_DIR + "/annotations"
# Create a isDroneObjectDetectionDataset instance
# This will wrap the VisDrone dataset to comply with the MAITE Dataset protocol
maite_dataset = VisDroneObjectDetectionDataset(
images_dir=IMAGES_DIR,
annotations_dir=ANNOTATIONS_DIR,
)
maite_dataset = stratified_sample_dataset(dataset=maite_dataset, subset_size=25)
print(f"Number of images: {len(maite_dataset)}")
example_img_id = 15
Number of images: 26
import urllib
import ultralytics
# Create a MAITE detector instance
# This will wrap a YOLO model to comply with the MAITE Object Detection protocol
ultralytics.checks()
print("Downloading model...")
model_path = "./yolo11l-visdrone.pt"
_ = urllib.request.urlretrieve(
"https://huggingface.co/erbayat/yolov11l-visdrone/resolve/main/yolo11l-visdrone.pt?download=true",
model_path,
)
model = ultralytics.YOLO(model_path)
# set model parameters
model.overrides["conf"] = 0.25 # NMS confidence threshold
model.overrides["iou"] = 0.5 # NMS IoU threshold
model.overrides["agnostic_nms"] = False # NMS class-agnostic
model.overrides["max_det"] = 1000 # maximum number of detections per image
maite_detector = MaiteYOLODetector(model=model)
Ultralytics 8.3.85 🚀 Python-3.10.18 torch-2.8.0+cu128 CUDA:0 (Quadro RTX 5000, 15928MiB)
Setup complete ✅ (40 CPUs, 251.5 GB RAM, 554.1/914.7 GB disk)
Downloading model...
Configure Your NRTK Perturbation Strategy#
Gaussian Blur Perturbation#
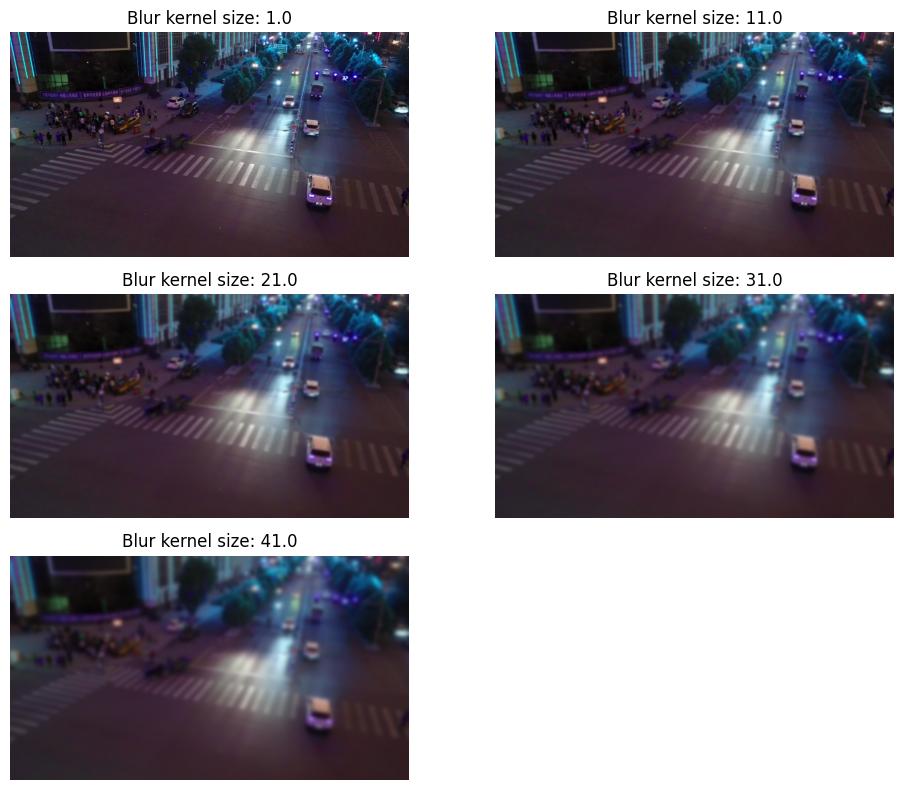
To perturb the input dataset with the Gaussian Blur operation, we set up a sequence of perturber configurations using the GaussianBlurPerturber that ranges across five blur kernel sizes (ksize). Each perturber configuration is applied to the entire dataset to create five new perturbed datasets.
import math
from nrtk.impls.perturb_image.photometric.blur import GaussianBlurPerturber
# Parameters for Gaussian blur perturbation sweep
SWEEP_LOW = 1 # minimum kernel size
SWEEP_HIGH = 41 # maximum kernel size
SWEEP_COUNT = 5 # number of values to sample
# Generate list of odd kernel sizes for Gaussian blur
blur_perturbation_values = np.linspace(
SWEEP_LOW,
SWEEP_HIGH,
SWEEP_COUNT,
endpoint=True,
)
blur_augmentations = []
for p in blur_perturbation_values:
p = int(round(p))
# Gaussian blur requires odd kernel sizes to maintain
# symmetric padding along the edges to preserve dimensionality.
p = int(math.floor(p))
if p % 2 == 0:
p += 1
blur_augmentations.append(GaussianBlurPerturber(ksize=p))
Gaussian perturbation example#
To understand each perturber’s setting, we visualize a sample image from each dataset.
# Visualize the perturbations on a sample image
img = maite_dataset[example_img_id][0].transpose(1, 2, 0)
fig, ax = plt.subplots(3, 2, figsize=(10, 8))
for idx, p in enumerate(blur_perturbation_values):
ax[idx // 2, idx % 2].set_title(f"Blur kernel size: {p}")
ax[idx // 2, idx % 2].imshow(blur_augmentations[idx](img)[0])
_ = ax[idx // 2, idx % 2].axis("off")
fig.delaxes(ax[2, 1])
plt.tight_layout()
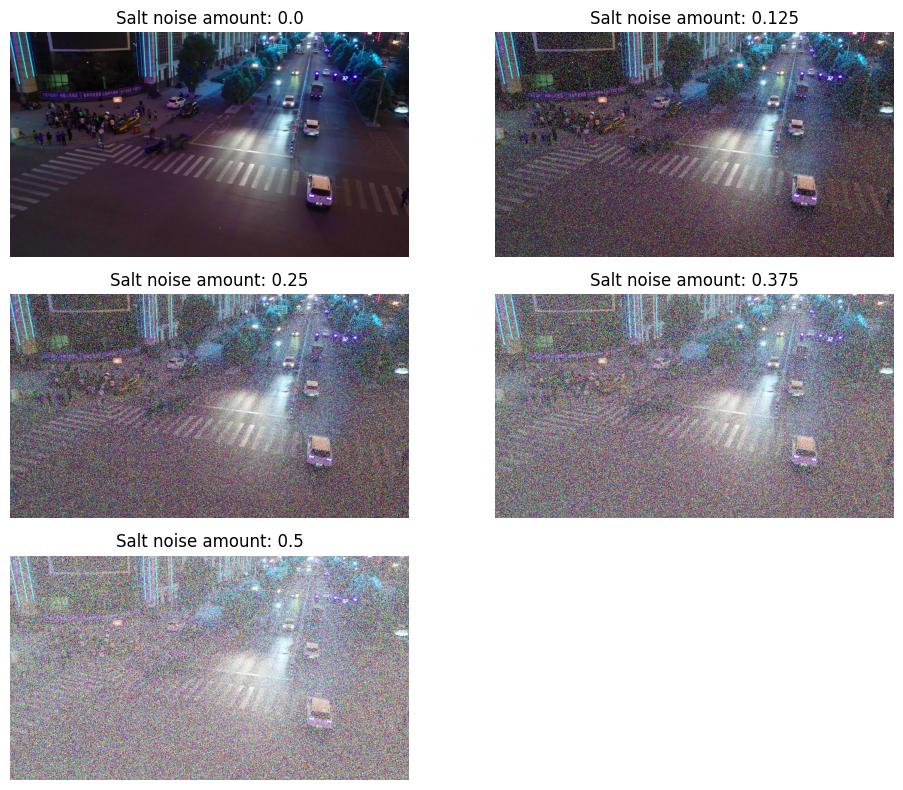
Salt Noise Perturbation#
To apply salt noise to the input dataset, we set up a sequence of perturber configurations using the SaltNoisePerturber that ranges across five salt noise amount values. Each perturber configuration is applied on the entire dataset to create five new perturbed datasets.
from nrtk.impls.perturb_image.photometric.noise import SaltNoisePerturber
# Parameters for salt noise perturbation sweep
SWEEP_LOW = 0.0 # minimum salt noise amount
SWEEP_HIGH = 0.50 # maximum salt noise amount
SWEEP_COUNT = 5 # number of values to sample
# Generate augmentations using salt noise with increasing intensity
noise_perturbation_values = np.linspace(
SWEEP_LOW,
SWEEP_HIGH,
SWEEP_COUNT,
endpoint=True,
)
salt_augmentations = [SaltNoisePerturber(amount=p) for p in noise_perturbation_values]
Salt noise perturbation example#
To understand each perturber’s setting, we visualize a sample image from each dataset.
# Visualize the perturbations on a sample image
img = maite_dataset[example_img_id][0].transpose(1, 2, 0)
fig, ax = plt.subplots(3, 2, figsize=(10, 8))
for idx, p in enumerate(noise_perturbation_values):
ax[idx // 2, idx % 2].set_title(f"Salt noise amount: {p}")
ax[idx // 2, idx % 2].imshow(salt_augmentations[idx](image=img)[0])
_ = ax[idx // 2, idx % 2].axis("off")
fig.delaxes(ax[2, 1])
plt.tight_layout()
Evaluate Perturbed Datasets#
Compute Mean Average Precision Metric#
For understanding the overall impact of the two different perturbers on model performance, we compute the model’s mean average precision metric across the various perturbed datasets. For this computation, we use a MAITE-compliant accuracy metric and evaluation workflow.
from maite.interop.metrics.torchmetrics import TMDetectionMetric
from maite.tasks import evaluate
from torchmetrics.detection.mean_ap import MeanAveragePrecision
from nrtk.interop import MAITEObjectDetectionAugmentation
# Initialize mAP metric (Maite-compatible)
tm_metric = MeanAveragePrecision(
box_format="xyxy",
iou_type="bbox",
iou_thresholds=[0.5],
rec_thresholds=[0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0],
max_detection_thresholds=[1, 10, 100],
class_metrics=True,
extended_summary=False,
average="macro",
)
maite_map_metric = TMDetectionMetric(tm_metric)
# List to store results for Gaussian blur perturbation
gauss_blur_perturbed_metrics = []
for idx, aug in enumerate(blur_augmentations):
# Create a MAITEObjectDetectionAugmentation instance for each perturbation
maite_aug = MAITEObjectDetectionAugmentation(augment=aug, augment_id=f"GaussianBlurPerturber_{idx}")
# reset the metric object for each dataset
maite_map_metric.reset()
result, _, _ = evaluate(
model=maite_detector,
metric=maite_map_metric,
dataset=maite_dataset,
augmentation=maite_aug,
)
gauss_blur_perturbed_metrics.append(result)
# List to store results for Gaussian blur perturbation
salt_noise_perturbed_metrics = []
for idx, aug in enumerate(salt_augmentations):
# Create a MAITEObjectDetectionAugmentation instance for each perturbation
maite_aug = MAITEObjectDetectionAugmentation(augment=aug, augment_id=f"SaltNoisePerturber_{idx}")
# reset the metric object for each dataset
maite_map_metric.reset()
result, _, _ = evaluate(
model=maite_detector,
metric=maite_map_metric,
dataset=maite_dataset,
augmentation=maite_aug,
)
salt_noise_perturbed_metrics.append(result)
100%|██████████| 26/26 [00:02<00:00, 9.21it/s]
100%|██████████| 26/26 [00:01<00:00, 20.17it/s]
100%|██████████| 26/26 [00:01<00:00, 17.06it/s]
100%|██████████| 26/26 [00:01<00:00, 15.06it/s]
100%|██████████| 26/26 [00:02<00:00, 12.99it/s]
100%|██████████| 26/26 [00:03<00:00, 6.53it/s]
100%|██████████| 26/26 [00:04<00:00, 5.39it/s]
100%|██████████| 26/26 [00:05<00:00, 5.19it/s]
100%|██████████| 26/26 [00:05<00:00, 5.10it/s]
100%|██████████| 26/26 [00:05<00:00, 5.06it/s]
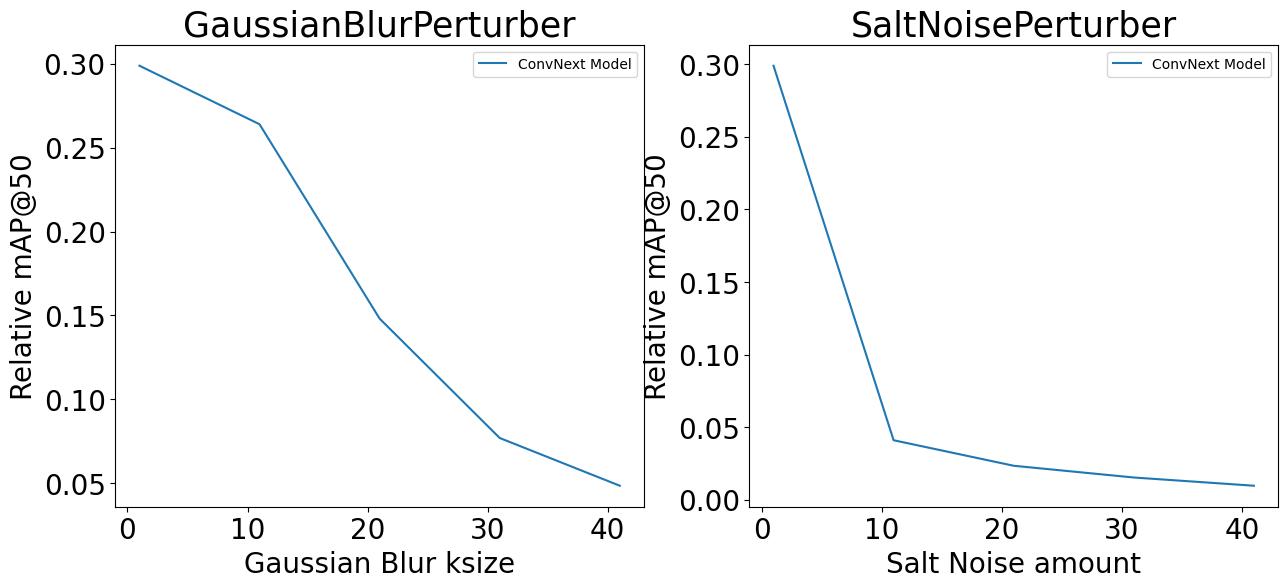
Generate Item Response Curves#
The mean average precision values (generated above) are visualized as item-response curves to understand the robustness of the model to varying degree of Blur and Salt noise perturbations. From the plots below, we can see a sharp drop in accuracy of the model on increasing the perturbation intensity.
fig, axes = plt.subplots(1, 2, figsize=(15, 6)) # Create 1-row, 2-column grid
_ = axes[0].plot(
blur_perturbation_values,
[m["map_50"] for m in gauss_blur_perturbed_metrics],
label="ConvNext Model",
)
axes[0].set_title("GaussianBlurPerturber", fontsize=25)
axes[0].set_xlabel("Gaussian Blur ksize", fontsize=20)
axes[0].set_ylabel("Relative mAP@50", fontsize=20)
axes[0].tick_params(axis="both", which="major", labelsize=20)
axes[0].legend()
# Salt noise results
_ = axes[1].plot(
blur_perturbation_values,
[m["map_50"] for m in salt_noise_perturbed_metrics],
label="ConvNext Model",
)
axes[1].set_title("SaltNoisePerturber", fontsize=25)
axes[1].set_xlabel("Salt Noise amount", fontsize=20)
axes[1].set_ylabel("Relative mAP@50", fontsize=20)
axes[1].tick_params(axis="both", which="major", labelsize=20)
axes[1].legend()
<matplotlib.legend.Legend at 0x71bbc88728f0>
Generate and Evaluate Saliency Maps#
Initialize D-RISE algorithm#
from xaitk_saliency.impls.gen_object_detector_blackbox_sal.drise import DRISEStack
# Saliency prep
model_mean = [95, 96, 93]
blackbox_fill = np.uint8(np.asarray(model_mean) * 255)
gen_drise = DRISEStack(n=150, s=7, p1=0.7, seed=0, threads=8)
gen_drise.fill = blackbox_fill.astype(int)
Metric Helper/Util Functions#
First, we set up the XAITK-Saliency metric helper/utility functions.
from dataclasses import dataclass, field
import matplotlib.pyplot as plt
import numpy as np
from object_detection.dataset import YOLODetectionTarget
from xaitk_saliency.impls.saliency_metric.entropy import Entropy
from xaitk_saliency.utils.sal_metrics import (
compute_ground_truth_coverage,
compute_iou_coverage,
compute_saliency_coverage,
compute_ssd,
compute_xcorr,
)
def get_selected_dets_np(
dets: Sequence[YOLODetectionTarget],
indices: Sequence[int],
) -> tuple[np.ndarray, np.ndarray]:
"""Get bounding boxes and scores for specific detection indices.
:param dets: Iterable of detected objects from YOLOModelWrapper.
:param indices: List of indices of the detections to select.
:return: Tuple of:
- Bounding boxes in (N, 4) format (xyxy).
- Confidence scores in (N, C) format (C = number of classes).
"""
dets = list(dets)[0] # Convert first iterable to list (assuming single image)
all_bboxes = []
all_scores = []
for i, (bbox, class_scores) in enumerate(dets):
if i in indices:
x1, y1 = bbox.min_vertex
x2, y2 = bbox.max_vertex
all_bboxes.append([x1, y1, x2, y2])
# Convert class scores to a fixed array format
score_vector = np.zeros(10, dtype=np.float32) # Assuming max 10 classes
for cls_idx, score in class_scores.items():
score_vector[cls_idx] = score
all_scores.append(score_vector)
# Convert to numpy arrays
selected_bboxes = np.array(all_bboxes, dtype=np.float32) if all_bboxes else np.empty((0, 4))
selected_scores = np.array(all_scores, dtype=np.float32) if all_scores else np.empty((0, 10))
return selected_bboxes, selected_scores
@dataclass
class PerturbationResult:
"""Dataclass for storing perturbed image and associated results."""
descriptor: str
img: np.ndarray
sal_maps: np.ndarray
pred_class: int
pred_prob: float
@dataclass
class SaliencyResults:
"""Dataclass for storing saliency map and associated results."""
ref_img: np.ndarray
ref_sal_maps: np.ndarray
gt: int
pred_class: int
pred_prob: float
perturbations: list[PerturbationResult] = field(default_factory=list)
def _compute_entropy_setup(sal_map: np.ndarray, m: str) -> float:
if m == "entropy":
compute_entropy = Entropy()
return compute_entropy(sal_map)
if m == "pos saliency entropy":
compute_entropy = Entropy(clip_range=(0, 1))
return compute_entropy(sal_map)
if m == "neg saliency entropy":
compute_entropy = Entropy(clip_range=(-1, 0))
return compute_entropy(sal_map)
return np.nan
def _compute_metric(sal_map: np.ndarray, ref_sal_map: np.ndarray, m: str) -> float | np.float64: # noqa: C901
if "entropy" in m:
return _compute_entropy_setup(sal_map, m)
if m == "ssd":
return compute_ssd(sal_map, ref_sal_map)
if m == "xcorr":
return compute_xcorr(sal_map, ref_sal_map)
if m == "iou_coverage":
return compute_iou_coverage(sal_map, ref_sal_map)
if m == "sal_coverage":
return compute_saliency_coverage(sal_map, ref_sal_map)
if m == "gt_coverage":
return compute_ground_truth_coverage(sal_map, ref_sal_map)
return np.nan
def create_binary_mask(bbox: Sequence[int], img_size: tuple[int, int]) -> np.ndarray:
"""Creates a binary mask where pixels inside the given bounding box are 1 and the rest are 0.
Args:
bbox (list or tuple): Bounding box in the form [x1, y1, x2, y2], where:
- (x1, y1) is the top-left corner.
- (x2, y2) is the bottom-right corner.
img_size (tuple): Size of the image as (height, width).
Returns:
np.ndarray: A binary mask of shape (height, width), where pixels inside the bbox are 1.
"""
# Unpack bounding box coordinates
x1, y1, x2, y2 = map(int, bbox) # Ensure integer values
# Create an empty mask
mask = np.zeros(img_size, dtype=np.uint8)
# Set pixels inside the bounding box to 1
mask[y1:y2, x1:x2] = 1
return mask
def compute_iou(box1: torch.Tensor, boxes2: torch.Tensor) -> torch.Tensor:
"""Computes IoU (Intersection over Union) between a single box and multiple boxes.
Args:
box1 (torch.Tensor): Single bounding box (4,).
boxes2 (torch.Tensor): Multiple bounding boxes (N, 4).
Returns:
torch.Tensor: IoU scores (N,).
"""
# Compute intersection coordinates
inter_x1 = torch.max(box1[0], boxes2[:, 0])
inter_y1 = torch.max(box1[1], boxes2[:, 1])
inter_x2 = torch.min(box1[2], boxes2[:, 2])
inter_y2 = torch.min(box1[3], boxes2[:, 3])
# Compute intersection area
inter_area = (inter_x2 - inter_x1).clamp(0) * (inter_y2 - inter_y1).clamp(0)
# Compute areas of both boxes
area1 = (box1[2] - box1[0]) * (box1[3] - box1[1])
area2 = (boxes2[:, 2] - boxes2[:, 0]) * (boxes2[:, 3] - boxes2[:, 1])
# Compute union area
union_area = area1 + area2 - inter_area
# Compute IoU
return inter_area / union_area.clamp(min=1e-6)
def get_best_iou_bbox(
detection: torch.Tensor | Sequence,
yolo_target: YOLODetectionTarget,
) -> tuple[torch.Tensor, torch.Tensor]:
"""Finds the ground truth bounding box from YOLODetectionTarget that has the highest IoU with the given detection.
Args:
detection (list or torch.Tensor): Bounding box in the form [x1, y1, x2, y2].
yolo_target (YOLODetectionTarget): Object containing ground truth boxes.
Returns:
tuple: (best_bbox, best_label)
- best_bbox (torch.Tensor): The ground truth bbox with the highest IoU.
- best_label (torch.Tensor): The class label of the best bbox.
"""
# Convert detection to a tensor if not already
detection = torch.tensor(detection, dtype=torch.float32)
# Extract ground truth bounding boxes
gt_boxes = yolo_target.boxes # Shape: (num_boxes, 4)
# Compute IoU with all ground truth boxes
ious = compute_iou(detection, gt_boxes)
# Find the index of the highest IoU
best_idx = int(torch.argmax(ious).item())
# best_iou = ious[best_idx].item()
# Retrieve the best matching bbox and label
best_bbox = gt_boxes[best_idx]
best_label = yolo_target.labels[best_idx]
return best_bbox, best_label
Saliency Generation#
Following the metric utils setup, we loop through both the GaussianBlurPerturber and SaltNoisePerturber perturbed datasets to generate predictions, compute saliency maps, and compute the related metric values.
from scipy.stats import pearsonr
# Initialize tracking lists for results
class_names = ["pedestrian", "people", "bicycle", "car", "van", "truck", "tricycle", "awning-tricycle", "bus", "motor"]
threshold = 0.8 # Higher confidence threshold to reduce the amount of detections and decrease notebook execution time
results = {}
for transform in blur_augmentations + salt_augmentations:
perturbation_type = transform.__class__.__name__
perturb_param_name = "ksize" if perturbation_type == "GaussianBlurPerturber" else "amount"
perturb_param_val = transform.ksize if perturbation_type == "GaussianBlurPerturber" else transform.amount
perturb_key = f"{perturbation_type}_{perturb_param_name}_{perturb_param_val}"
print(perturb_key)
confs = np.empty(0)
ssds = []
xcorrs = []
ious = []
sal_coverages = []
gt_coverages = []
sal_maps = {}
bboxes = {}
truth_labels = {}
truth_scores = {}
perturbed_images = {}
pred_scores = {}
pred_labels = {}
for i in range(len(maite_dataset)):
# prep imagery
ref_image, targets, metadata = maite_dataset[i]
ref_image = np.asarray(ref_image)
trans_img = transform(ref_image.transpose(1, 2, 0).astype(np.uint8))[0]
# run model
yolo_dets = maite_detector.detect_objects(np.expand_dims(trans_img, 0))
if len(yolo_dets[0]) == 0:
print(f"No detections found for image {i} with {perturb_key}")
continue
yolo_bboxes, yolo_scores = get_selected_dets_np(yolo_dets, range(10))
confs = np.append(confs, np.max(yolo_scores, axis=1))
# Compute correlations
yolo_sal_maps = gen_drise(trans_img, yolo_bboxes, yolo_scores, maite_detector)
sal_maps[i] = yolo_sal_maps
gt_bboxes = []
gt_labels = []
for idx, sal_map in enumerate(yolo_sal_maps):
gt_bbox, gt_label = get_best_iou_bbox(yolo_bboxes[idx], targets)
gt_bboxes.append(gt_bbox.numpy())
if gt_label.item() > len(class_names) - 1:
gt_labels.append("n/a")
else:
gt_labels.append(class_names[gt_label.item()])
if ref_image.ndim == 3 and ref_image.shape[0] <= 3:
ref_image = np.transpose(ref_image, (1, 2, 0))
gt_mask = create_binary_mask(gt_bbox, ref_image.shape[0:2]).astype(
np.float64,
)
sal_map_mask = (sal_map > threshold).astype(np.float64)
ious.append(
round(
_compute_metric(sal_map_mask, gt_mask, "iou_coverage"),
5,
),
)
sal_coverages.append(
round(
_compute_metric(sal_map_mask, gt_mask, "sal_coverage"),
5,
),
)
gt_coverages.append(
round(
_compute_metric(sal_map_mask, gt_mask, "gt_coverage"),
5,
),
)
ssds.append(
round(
_compute_metric(sal_map_mask, gt_mask, "ssd"),
5,
),
)
xcorrs.append(
round(
_compute_metric(sal_map_mask, gt_mask, "xcorr"),
5,
),
)
bboxes[i] = gt_bboxes
truth_labels[i] = gt_labels
pred_labels[i] = [class_names[score] for score in yolo_scores.argmax(axis=1)]
pred_scores[i] = yolo_scores.max(axis=1)
perturbed_images[i] = trans_img
correlations = {}
confs = confs.flatten()
for metric_name, metric_values in zip(
["ssd", "xcorr", "iou", "sal_coverage", "gt_coverage"],
[np.asarray(ssds), np.asarray(xcorrs), np.asarray(ious), np.asarray(sal_coverages), np.asarray(gt_coverages)],
strict=False,
):
mask = ~np.isnan(metric_values) & ~np.isinf(metric_values)
filtered_metric_values = metric_values[mask]
filtered_confs = confs[mask]
if np.std(confs) == 0:
print("Pearson correlation is undefined (zero variance).")
continue
if len(filtered_metric_values) < 2:
correlations[f"corr_conf_{metric_name}"] = np.nan
else:
correlations[f"corr_conf_{metric_name}"] = pearsonr(
filtered_confs,
filtered_metric_values,
)[0]
# Store results
correlation_results = {
"perturber": perturbation_type,
"param_value": perturb_param_val,
"bboxes": bboxes,
"truth_labels": truth_labels,
"pred_labels": pred_labels,
"pred_scores": pred_scores,
"sal_maps": sal_maps,
"perturbed_images": perturbed_images,
**correlations,
}
results[perturb_key] = correlation_results
GaussianBlurPerturber_ksize_1
GaussianBlurPerturber_ksize_11
No detections found for image 12 with GaussianBlurPerturber_ksize_11
GaussianBlurPerturber_ksize_21
No detections found for image 12 with GaussianBlurPerturber_ksize_21
No detections found for image 23 with GaussianBlurPerturber_ksize_21
No detections found for image 25 with GaussianBlurPerturber_ksize_21
GaussianBlurPerturber_ksize_31
No detections found for image 4 with GaussianBlurPerturber_ksize_31
No detections found for image 5 with GaussianBlurPerturber_ksize_31
No detections found for image 12 with GaussianBlurPerturber_ksize_31
No detections found for image 18 with GaussianBlurPerturber_ksize_31
No detections found for image 23 with GaussianBlurPerturber_ksize_31
No detections found for image 25 with GaussianBlurPerturber_ksize_31
GaussianBlurPerturber_ksize_41
No detections found for image 4 with GaussianBlurPerturber_ksize_41
No detections found for image 12 with GaussianBlurPerturber_ksize_41
No detections found for image 14 with GaussianBlurPerturber_ksize_41
No detections found for image 18 with GaussianBlurPerturber_ksize_41
No detections found for image 23 with GaussianBlurPerturber_ksize_41
No detections found for image 25 with GaussianBlurPerturber_ksize_41
SaltNoisePerturber_amount_0.0
SaltNoisePerturber_amount_0.125
No detections found for image 12 with SaltNoisePerturber_amount_0.125
SaltNoisePerturber_amount_0.25
SaltNoisePerturber_amount_0.375
No detections found for image 12 with SaltNoisePerturber_amount_0.375
SaltNoisePerturber_amount_0.5
No detections found for image 12 with SaltNoisePerturber_amount_0.5
No detections found for image 14 with SaltNoisePerturber_amount_0.5
No detections found for image 16 with SaltNoisePerturber_amount_0.5
from matplotlib.axes import Axes
from matplotlib.figure import Figure
from matplotlib.patches import Rectangle
def visualize_saliency( # noqa: C901
pert_images: list[np.ndarray],
truth_labels: list[str],
bboxess: list[np.ndarray],
sal_maps_1: list[np.ndarray],
pred_labels_1: list[str],
pred_scores_1: list[float],
perturb_param: str,
perturb_values: list[float],
title: str,
bbox_id: int,
) -> tuple[Figure, list[Axes]]:
"""Visualize reference image and corresponding saliency maps.
This function creates the visualization for the NRTK-XAITK quick task.
It has three columns: a perturbed image, the saliency with respect to the true
class, and the saliency with respect to the predicted class.
This is repeated for the variable number of perturbations provided. For the quick task,
the first 'perturbation' was the unperturbed, baseline image. All arguments are lists
Returns:
tuple: (figure object, list of axis objects)
"""
# Determine layout dimensions
n_cols = 2
n_rows = len(pert_images)
fontsize = 20
fontdiff = 4
# Create figure and axes grid
fig, axes = plt.subplots(n_rows, n_cols, figsize=(n_cols * 4, n_rows * 3))
axes = axes.flatten()
correct_bbox = bboxess[0][bbox_id]
for (
perturb_index,
pert_image,
truth_label,
bboxes,
sal_map_1,
pred_label_1,
pred_score_1,
perturb_value,
) in zip(
range(n_rows),
pert_images,
truth_labels,
bboxess,
sal_maps_1,
pred_labels_1,
pred_scores_1,
perturb_values,
strict=False,
):
matching_bbox = None
matching_idx = None
for idx, bbox in enumerate(bboxes):
if np.allclose(bbox, correct_bbox):
matching_bbox = bbox
matching_idx = idx
break
if matching_bbox is None:
print("Couldn't find matching bbox")
return None
x_1, y_1 = matching_bbox[0], matching_bbox[1]
x_2, y_2 = matching_bbox[2], matching_bbox[3]
base_ind = perturb_index * n_cols
for spine in axes[base_ind].spines.values():
spine.set_visible(False)
axes[base_ind].add_patch(
Rectangle((x_1, y_1), x_2 - x_1, y_2 - y_1, linewidth=1, edgecolor="r", facecolor="none"),
)
axes[base_ind].imshow(pert_image)
axes[base_ind].set_xticks([])
axes[base_ind].set_yticks([])
if perturb_index == 0:
axes[base_ind].text(
0.5,
1.1,
"Perturb Value",
transform=axes[base_ind].transAxes,
ha="center",
va="bottom",
fontsize=fontsize,
fontweight="bold",
)
axes[base_ind].text(
0.5,
0.99,
f"{perturb_param}: {round(perturb_value, ndigits=3)}",
transform=axes[base_ind].transAxes,
ha="center",
va="bottom",
fontsize=fontsize - fontdiff,
fontweight="bold",
)
axes[base_ind + 1].set_axis_off()
color_1 = "green" if truth_label[matching_idx] == pred_label_1[matching_idx] else "red"
# Saliency of First Object
axes[base_ind + 1].add_patch(
Rectangle((x_1, y_1), x_2 - x_1, y_2 - y_1, linewidth=1, edgecolor="r", facecolor="none"),
)
axes[base_ind + 1].imshow(pert_image, alpha=0.7)
axes[base_ind + 1].imshow(sal_map_1[matching_idx], cmap="jet", alpha=0.3)
if perturb_index == 0:
axes[base_ind + 1].text(
0.5,
1.3,
f"Truth: {truth_label[matching_idx]}",
transform=axes[base_ind + 1].transAxes,
ha="center",
va="bottom",
fontsize=fontsize,
fontweight="bold",
)
axes[base_ind + 1].text(
0.5,
0.99,
f"Prediction: {pred_label_1[matching_idx]}\nScore: {pred_score_1[matching_idx]:.2f}",
transform=axes[base_ind + 1].transAxes,
color=color_1,
ha="center",
va="bottom",
fontsize=fontsize - fontdiff,
fontweight="bold",
)
plt.tight_layout(rect=[0, 0, 1, 0.95])
fig.suptitle(title, fontsize=fontsize + 2, fontweight="bold")
fig.subplots_adjust(wspace=0.00, hspace=0.3)
return fig, axes
blur_perturbation_values = [aug.ksize for aug in blur_augmentations]
_, ax = visualize_saliency(
[
results[f"GaussianBlurPerturber_ksize_{int(val)}"]["perturbed_images"][example_img_id]
for val in blur_perturbation_values
],
[
results[f"GaussianBlurPerturber_ksize_{int(val)}"]["truth_labels"][example_img_id]
for val in blur_perturbation_values
],
[results[f"GaussianBlurPerturber_ksize_{int(val)}"]["bboxes"][example_img_id] for val in blur_perturbation_values],
[
results[f"GaussianBlurPerturber_ksize_{int(val)}"]["sal_maps"][example_img_id]
for val in blur_perturbation_values
],
[
results[f"GaussianBlurPerturber_ksize_{int(val)}"]["pred_labels"][example_img_id]
for val in blur_perturbation_values
],
[
results[f"GaussianBlurPerturber_ksize_{int(val)}"]["pred_scores"][example_img_id]
for val in blur_perturbation_values
],
"ksize",
blur_perturbation_values,
"Gaussian Blur",
0,
)
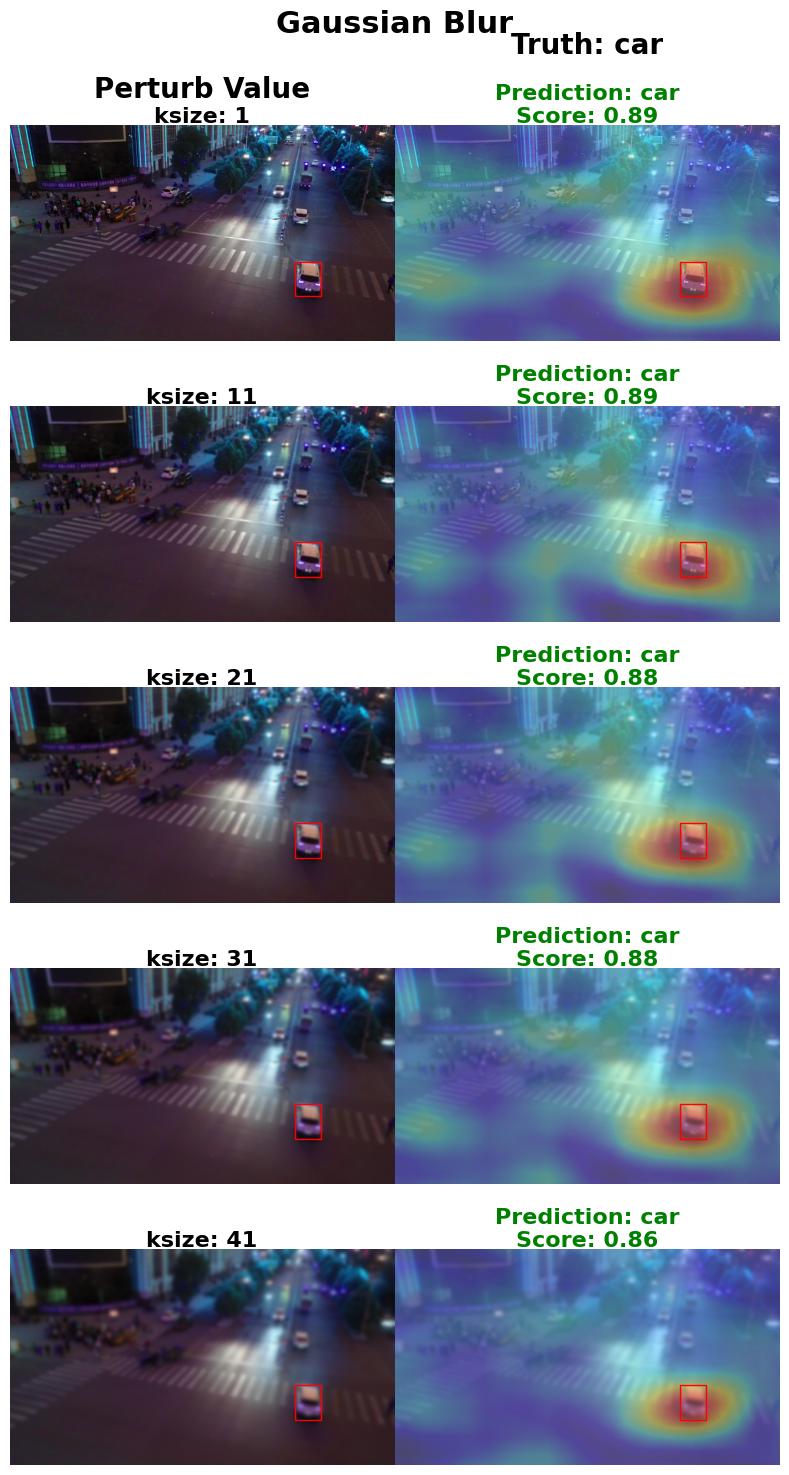
From the experiment results, we can see that increasing the blur intensity has little to no impact on detection performance. The confidence score decreases only slightly, indicating that the detection remains highly reliable.
This robustness can be explained by two key factors:
Object Size – Larger objects in the scene are less sensitive to blur effects.
Object Location – The position of the object within the image contributes to maintaining stable detection confidence.
As a result, even with higher levels of blur, the saliency map shows more focused clustering on the detected object. This effect is especially noticeable when smaller pedestrian objects are also present in the scene, making the main object stand out more clearly under blur conditions.
salt_perturbation_values = [aug.amount for aug in salt_augmentations]
salt_perturbation_values = salt_perturbation_values[:-1] # exclude the last one due to no predicted detections
fig, ax = visualize_saliency(
[
results[f"SaltNoisePerturber_amount_{val}"]["perturbed_images"][example_img_id]
for val in salt_perturbation_values
],
[results[f"SaltNoisePerturber_amount_{val}"]["truth_labels"][example_img_id] for val in salt_perturbation_values],
[results[f"SaltNoisePerturber_amount_{val}"]["bboxes"][example_img_id] for val in salt_perturbation_values],
[results[f"SaltNoisePerturber_amount_{val}"]["sal_maps"][example_img_id] for val in salt_perturbation_values],
[results[f"SaltNoisePerturber_amount_{val}"]["pred_labels"][example_img_id] for val in salt_perturbation_values],
[results[f"SaltNoisePerturber_amount_{val}"]["pred_scores"][example_img_id] for val in salt_perturbation_values],
"amount",
salt_perturbation_values,
"Salt Noise",
0,
)
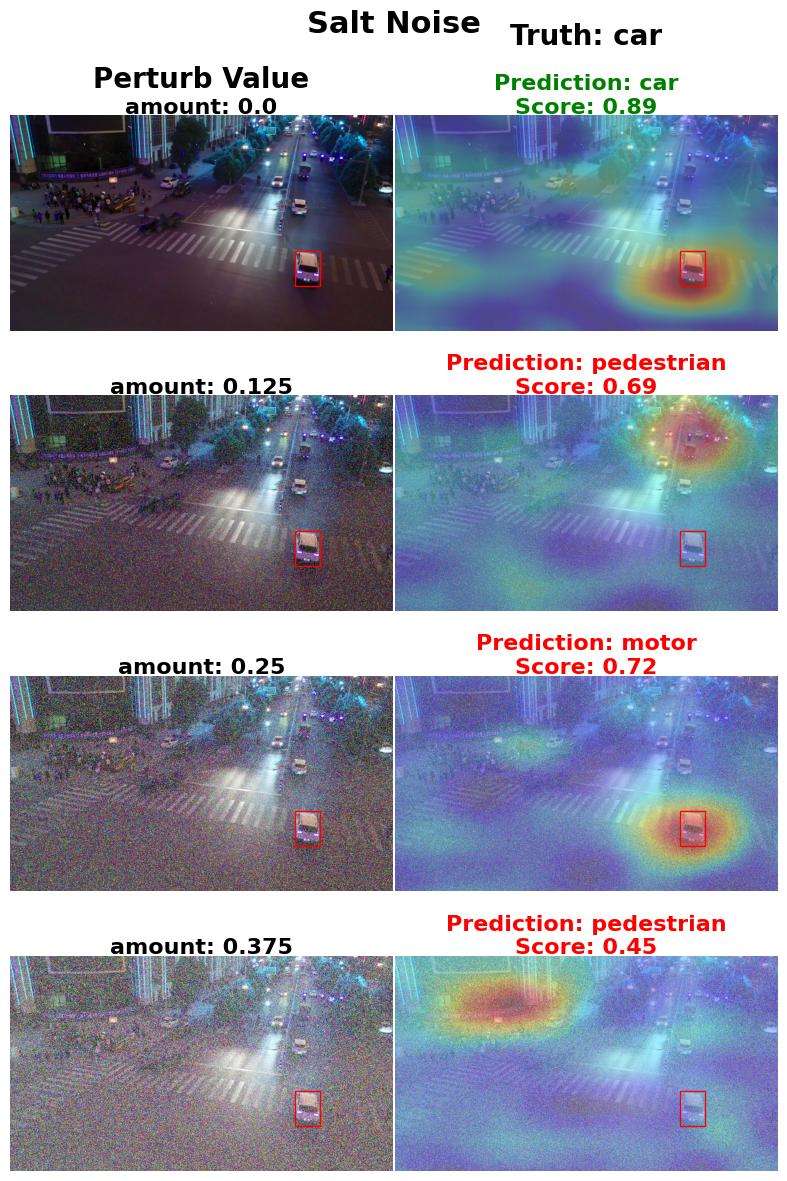
When adding even a small amount of salt noise, the detection performance changes drastically. Unlike blur, salt noise causes the confidence score to drop sharply, making the detection far less reliable.
Observations from the set of results above (each example after the first one adds in an incremental amount of salt noise):
The first example is the unperturbed predicted detection.
In the second example, the model shifts its attention to
pedestrianfocused areas as soon as a slight amount of salt noise is introduced.In the third example, the model loses focus again and shifts attention to irrelevant areas — in this case, clustering around a random region near the top-right of the image.
In the fourth example, the model focuses on a random region in the top-left of the image similar to the second example.
This shows that the model is highly sensitive to salt noise, which disrupts the feature patterns, leading to inconsistent detections.
Conclusion#
Based on visualizing the saliency maps on two different perturbed object detection image samples, we were able to observe how the model’s predictions reinforced larger detections as the blur intensity increased. On the other hand, we also observed how a small amount of salt noise could throw away the predictive accuracy and consistency of the model by shifting focus to regions of the image that were away from the target object class.
Similarly, through this NRTK-XAITK Perturbation Saliency analysis, we presented an end-to-end workflow that enables modular interpretability and explainability of an Object Detection model’s and dataset’s robustness to natural or physics-based perturbations.